10/01/2022
Ship simulation in rough seas
The Elomatic technical analysis team has been developing and testing the methods for ship hydrodynamics simulation in rough seas.
The ships sail most of the time in wave conditions which differ from the specified promised speed test conditions. The calm sea conditions are closer to reality for very big ships, as typical wave conditions and their impact remain relatively small. However, for a ship scale with a length of 100m and under, the wave impact on ship behavior becomes more essential. To design ships of that length and meet real conditions with as high performance as possible, the computational dynamics should be used as much as for calm sea conditions.
Nowadays the ship hull form is usually optimized with Computational Fluid Dynamics (CFD) in calm water simulations. CFD optimization allow a huge number of alternatives to be simulated and tested during the process. These results are then factored into the other requirements to meet optimal solution for the ship design.
Estimating hull performance is an important part of the ship hull design process for any vessel type. It influences all design disciplines, so figuring out the main hull shape early on in the concept design stage is crucial. Ship design is highly interconnected, so changes in space reservations for ship functions can cause changes to hull main particulars, which in turn affect to the power requirements and so on.
Once the hull shape is optimized with CFD and other design work has been started, model tests are performed for the hull. Usually these contain all of the necessary tests to fully evaluate the hull. Hull performances are tested in calm water as well as in some of the most demanding sea conditions to check that the ship has met the requirements for motion, slamming and rolling. Based on these results, in practice only a few minor adjustments are available for hull modifications, as late changes to the design increase the cost and delay the schedule easily.
Development project
The development project included several stages starting from the literature study and test cases with simplified geometry, ending with a comparison of model scale measurements and simulations in rough sea conditions. In between, different sizes of vessels were tested and simulated in demanding circumstances to find the vessel size impact on the simulation results or behavior of the simulation models.
Floatable steel island
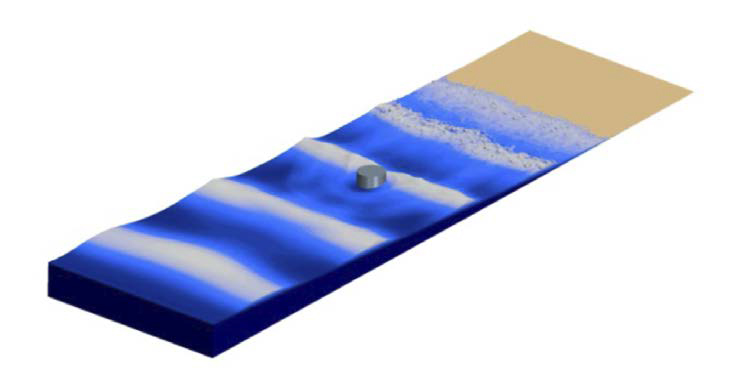
Elomatic’s innovation for a floatable island was chosen for the initial simulations. The island is located in shallow water with a fixed position, allowing a good starting point for rough seas calculations.
The simulation model was selected to serve our development work done for the islands, to get wave loads in realistic sea conditions.
Our calculation team’s main target was getting the simulation process to work decently and of course to get realistic wave conditions simulated and structure loads analyzed for the island in this case.
The visualizations derived from the simulation results match expectation well, supporting the impression that the model should be working as intended. The details detected in the animation made in post-processing show even small splashing observed in the figure captured from the animation. The island drag forces generated by the waves were in good agreement with literature values for a cylindrical obstacle. These are quite rough estimates, but they do show that the results are in the ballpark of what is expected.
Model scale measurements vs full scale simulations and sea trial
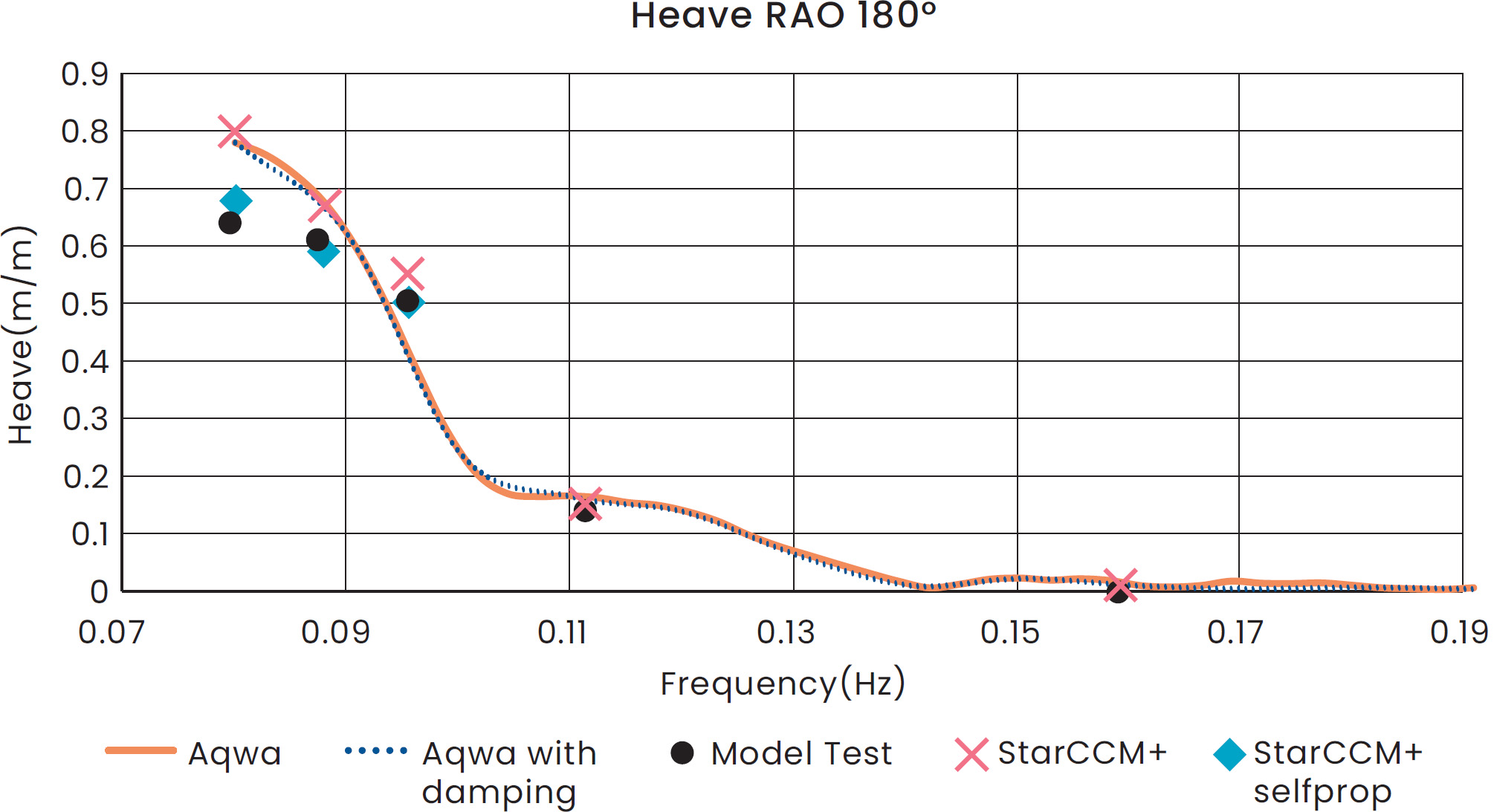
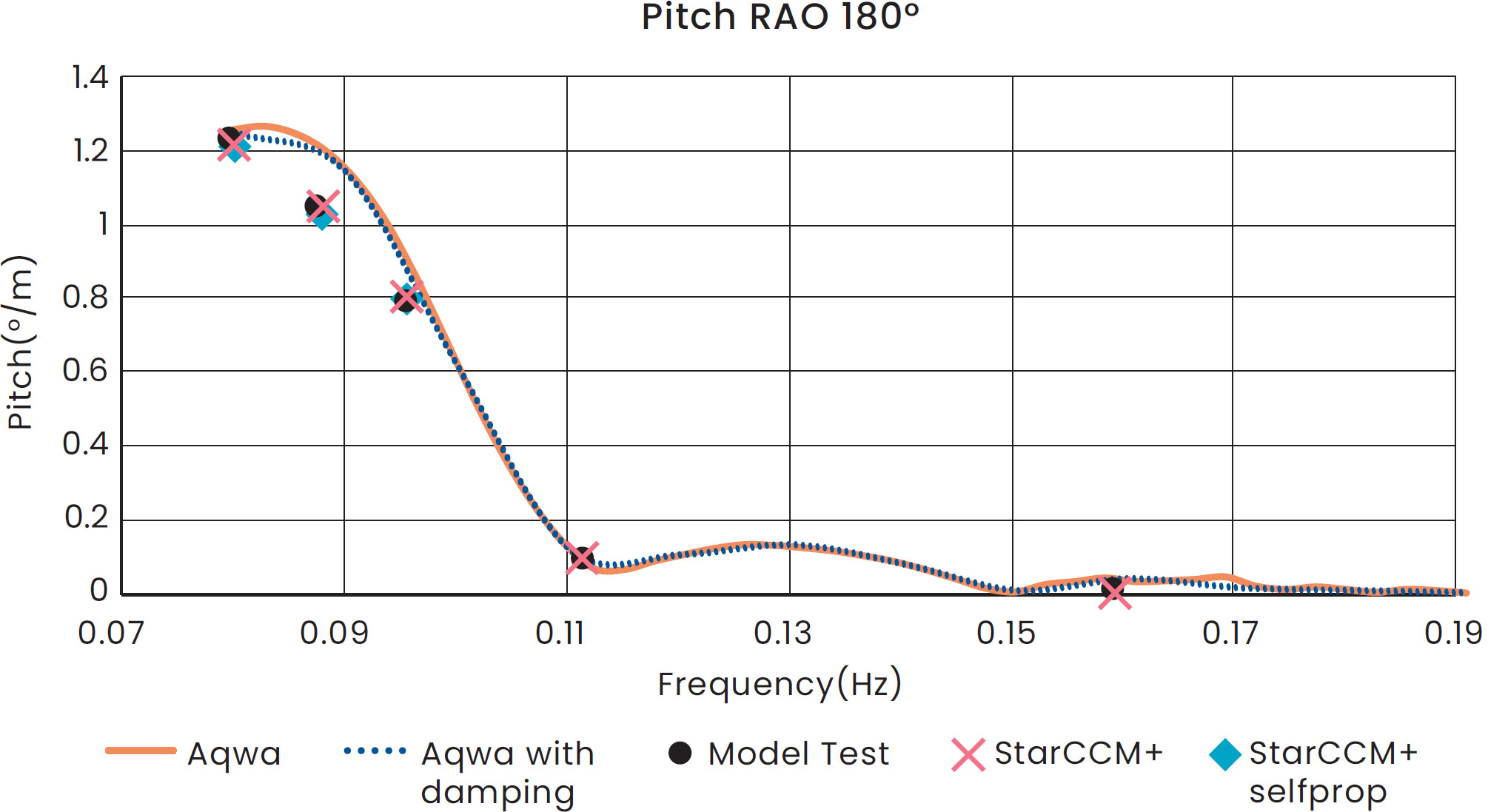
Simulations were carried out for a 200-meter-long sea faring vessel. The vessel chosen is Superfast III (she has a sister ship, Superfast IV) which is a Ro-Pax-type vessel completed in 1998 in a Turku shipyard. A full hull model and Napa models were available for the simulation model, and MARIN’s model test reports for maneuvering, seakeeping and calm water were available to use for comparison as well as the observations from the sea trial (Published in Meyer Turku’s hydrodynamics training course 2016/ R. Hämäläinen). The vessel was simulated in both regular and irregular waves, with fore waves in both cases and two oblique directions in the regular waves.
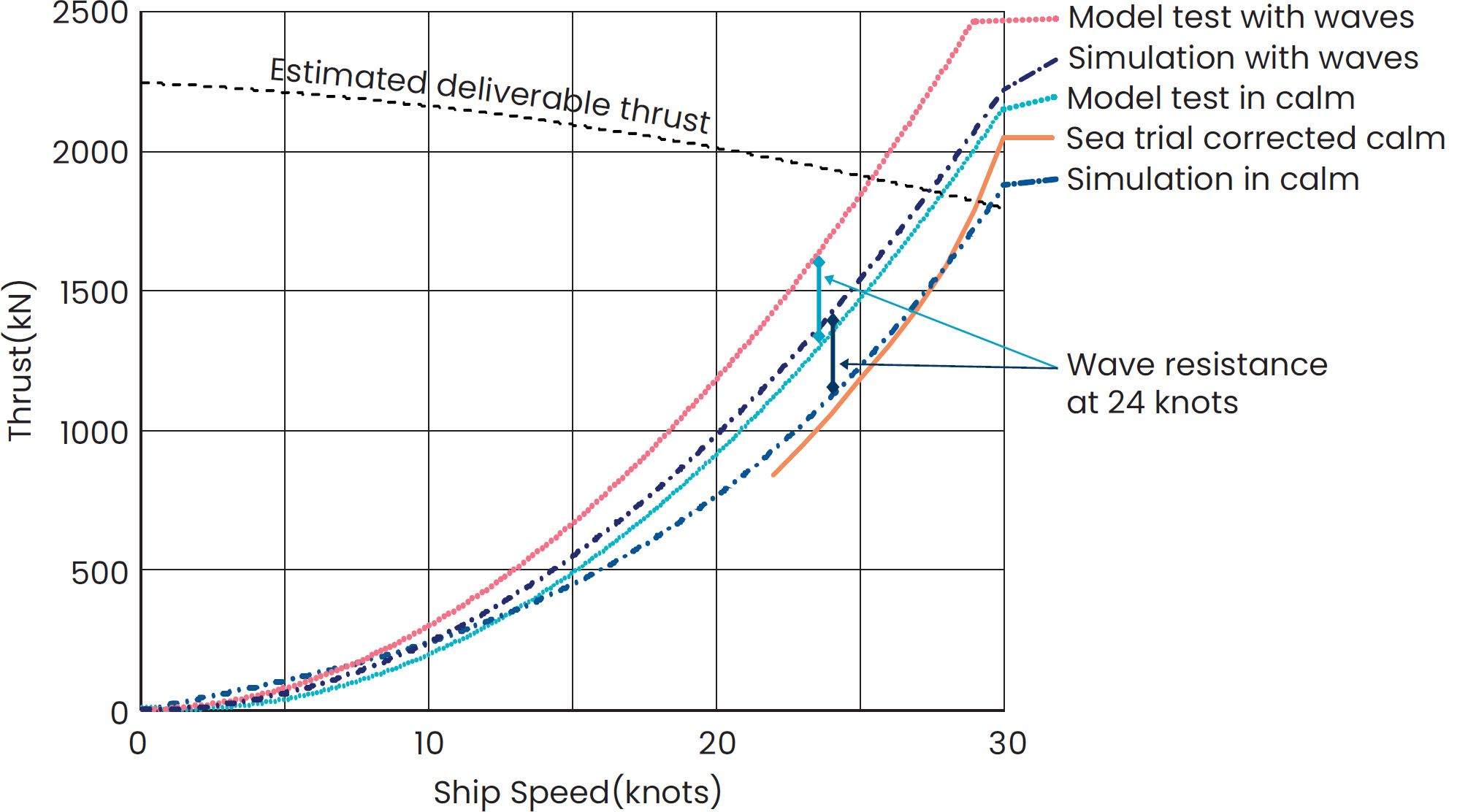
The vessel has a wave-damping afterbody, which was a new type of design during its production. This meant that the model testing did not have a close match for a reference vessel, which in turn lead to an overly conservative estimate for the vessel’s top speed. In sea trials and in use the vessel managed about 2 knots higher top speed than predicted by model tests, but the motions and stability were within the predictions.
Several different wave lengths were simulated in regular wave cases, with a few different methods. Modeling self-propulsion with an actuator disc was found to be most suitable way for accurate results considering the computational resources needed. The simulation results with actuator disc were very well aligned with the model tests in vessel motions. More simplified methods were also tested. According to the results from these, they could be useful in some rough estimation studies because of the quicker run-through time.
A few irregular wave simulations were run to estimate the power requirement in different sea conditions. The wave-added resistance matched that of the model test closely, but with the calm water result aligning more closely to the sea trial corrected values. This means that the simulations could predict the performance in several sea states more accurately than the model test.
Vessel size impact to simulations
Rough sea condition simulations were run for the 100m patrol vessel and the 20m patrol boat, but only in regular waves. The simulation method was selected after several tests completed for the alternatives existing. The most promising method satisfied the reliability of the simulation but also kept the calculation time reasonable. A structural model existed for the 20m patrol boat providing an opportunity to combine structural simulation with fluid dynamics. The fluid structure interaction (FSI) allows detecting the highest loads contributed by the rough sea conditions to the boat structure. In an FSI model, the loads from the CFD solution are transferred as boundary conditions into the structural analysis, in which they can be used to analyze the fatigue and vibrations of the structure over a specific wave condition. The simulation method was found to work nicely giving reasonable results, however at the moment we would need to get proper data from measurements in similar conditions to evaluate the outcome of FSI simulations.
Conclusions
The simulations for ship hull shape optimization in real sea conditions is not a common practice yet, as big ships usually behave in a similar way in calm seas as they do in most typical wave conditions. For ship sizes below 100m, the wave impact becomes more important when optimizing the ship hull, when the ship movement increases.
In this R&D project, we found methods to provide a computationally effective way for simulating under-100m ships in realistic sea conditions. The sea conditions have impacts on the requirements of the ship hull forms, providing wave-contributed structural loads from the CFD simulation to be used in FEM analysis.
The comparison of Superfast performing in different sea conditions were in relatively good agreement with model tests. The max speed detected in sea trials was underestimated in model tests, while simulation results at full scale did not differ much from the observed speed.
This work has provided Elomatic great insight into the ship wave simulations, and in the future we can offer an array of new simulation products for our customers.
With these new tools, we can design better performing ships in a more effective way, with increased accuracy from sea conditions included in the modeling.